Telescopes and Facilities
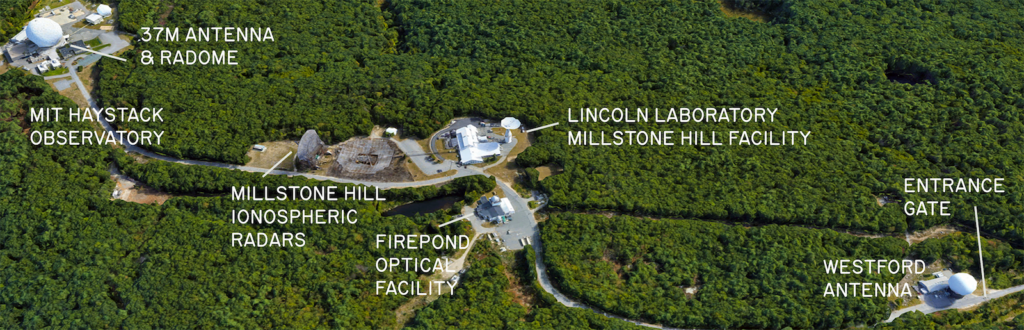
MIT Haystack Observatory is an interdisciplinary radio science research center whose mission is to advance scientific research and technological developments in radio astronomy, geodesy, and geospace science. The 1300-acre campus in Westford, Massachusetts, is home to several major scientific and technological facilities, including:
- The Haystack 37m Telescope
- The Millstone Hill Incoherent Scatter Radar
- The Westford Radio Telescope
- The Haystack VLBI Correlator for Astronomy and Geodesy